
การประยุกต์ใช้ระบบตรวจสอบโรคกล้วยไม้แบบควบคุมระยะไกลร่วมกับเทคนิคการประมวลผลภาพถ่าย
27 กันยายน 2021
ข้าวกล้องหอมนิลเพาะงอกหุงสุกในรีทอร์ทเพาซ์
27 กันยายน 2021
การออกแบบกลไกลอเจนิวาอย่างง่าย
กลไกล้อเจนิวาเป็นกลไกที่เปลี่ยนการเคลื่อนที่แบบต่อเนื่อง (Continuous) มาเป็นแบบไม่ต่อเนื่อง (Intermittent) กล่าวคือ ขณะที่เคลื่อนที่จะมีการหยุดเป็นช่วงๆ ตามจังหวะการหมุนของล้อเจนิวา ซึ่งสามารถนำเอาการทำงานของกลไกนี้ไปใช้ประโยชน์ได้มาก เช่น การหยุดเพื่อให้ป้อนชิ้นงานใหม่ ตัวอย่างการใช้งานของกลไกนี้ในเครื่องจักรกลเกษตร ได้แก่ เครื่องแทงดีบัวดังรูปที่ 1 ที่ออกแบบล้อเจนิวาเพื่อใช้ขับเคลื่อนชุดลำเลียงเมล็ดบัวหลวงของเครื่องดังรูปที่ 1(ข) ซึ่งจะต้องทำงานเคลื่อนที่สัมพันธ์กับชุดแทงดีบัวดังรูปที่ 1(ค)
-
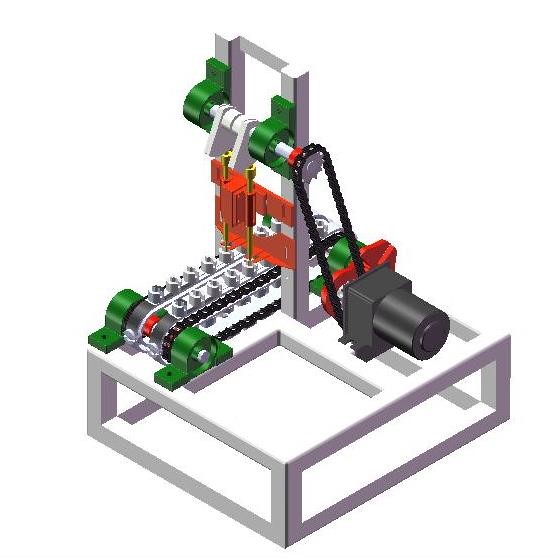
- ก) ส่วนประกอบของเครื่องเครื่องแทงดีบัว
-
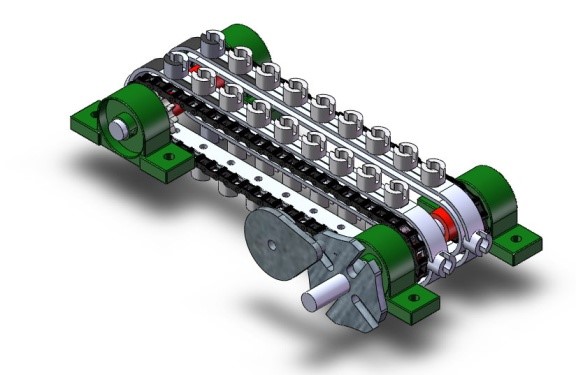
- ข) การใช้กลไกล้อเจนิวาเป็นตัวขับเคลื่อนชุดลำเลียงเมล็ดบัว
-
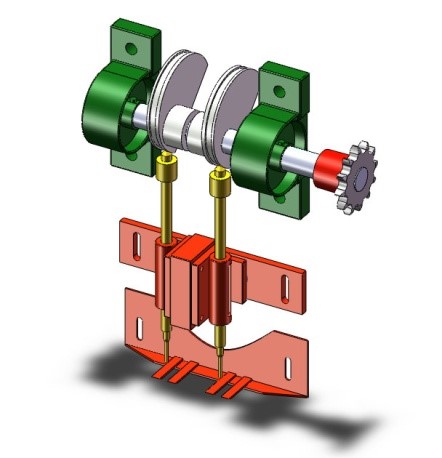
- ค) ชุดแทงดีบัว
รูปที่ 1 เครื่องแทงดีบัว
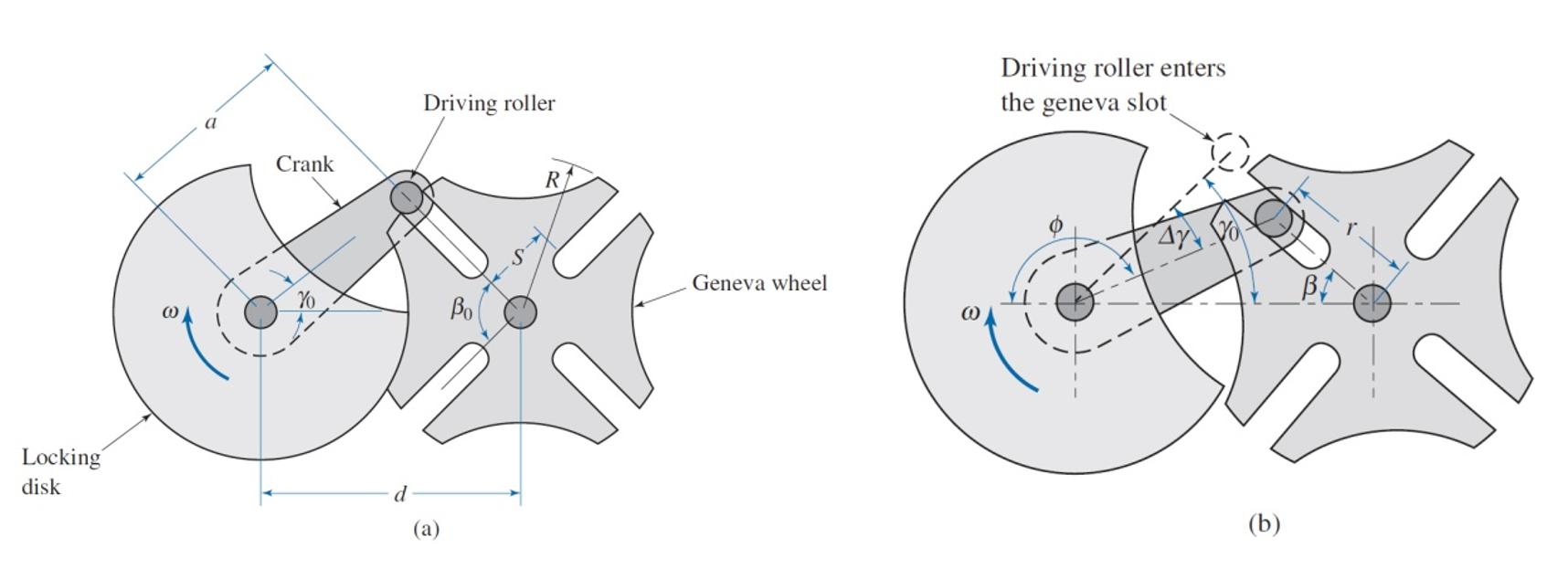
กลไกล้อเจนิวา ดังรูปที่ 2 นิยมนำไปใช้ทำงานที่ความเร็วรอบต่ำหรือใช้ในงานที่มีโหลดไม่มากนัก มีส่วนประกอบหลัก คือ
- ชิ้นส่วนตัวขับประกอบด้วย แผ่นล็อค (Locking Disk) ทำหน้าที่เป็นตัวขัดไม่ให้ตัวตามหมุนย้อนกลับซึ่งจะติดอยู่บนข้อเหวี่ยง (Crank) ที่มีลูกกลิ้งขับ (Driving Roller) ยื่นออกไปเพื่อใช้ขับในร่องของชิ้นส่วนตัวตาม โดยชิ้นส่วนนี้จะเคลื่อนที่หมุนรอบตัวแบบต่อเนื่อง
ชิ้นส่วนตัวตามล้อเจนิวา (Geneva Wheel) จะมีร่องอยู่บนตัวจำนวน 4 ร่องตามเฟสดังรูป โดยชิ้นส่วนนี้จะเคลื่อนที่หมุนรอบตัวจากการขับของตัวขับแบบไม่ต่อเนื่อง
รูปที่ 2 กลไกล้อเจนิวา
ถ้าคุณเป็นผู้ที่มีความรู้ทางด้านวิศวกรรมคงไม่ยากที่จะหาวิธีการและสมการต่างๆ ที่จะนำมาใช้ในการออกแบบกลไกนี้ แต่ถ้าคุณไม่มีความรู้ทางด้านวิศวกรรมเลยคงไม่ใช่เรื่องง่ายแน่ๆ ดังนั้นบทความนี้จึงขอนำเสนอการออกแบบกลไกล้อเจนิวาอย่างง่ายที่บุคคลทั่วไปสามารถนำไปใช้งานได้โดยไม่เน้นการคำนวณใดๆ เพียงแต่ต้องรู้ขนาดและจำนวนร่องของล้อเจนิวาที่ต้องการ ผู้ออกแบบสามารถวาดลงบนกระดาษหรือใช้โปรแกรมเขียนแบบใดๆ ก็ได้ ตัวอย่างต่อไปนี้เป็นการออกแบบกลไกล้อเจนิวาขนาด 2 นิ้ว และมีร่องสลอท(Slot) 5 ร่อง มีขั้นตอนดังนี้
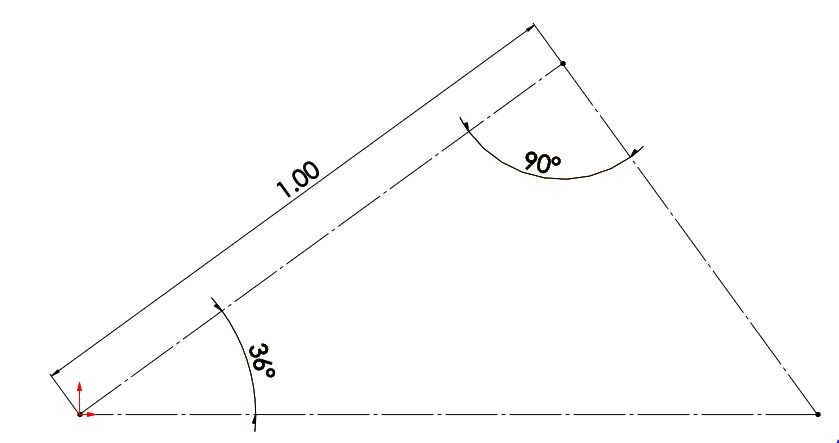
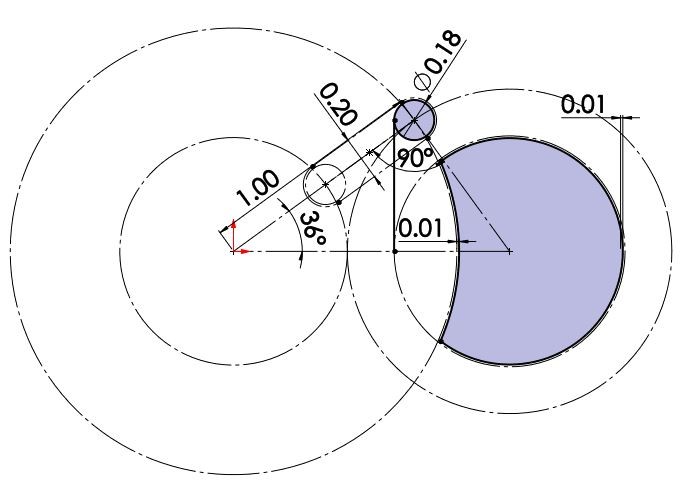
1.เริ่มจากวาดสามเหลี่ยมมุมฉากเพื่อใช้เป็นจุดต่อเชื่อมส่วนประกอบต่างๆ ของกลไกล้อเจนิวาดังรูป โดยด้านมุมฉากยาว 1.0 นิ้ว (ความยาวเท่ากับรัศมีของล้อเจนิวา) วาดให้อยู่ด้านบนเสมอ และมุมทางซ้ายของรูปสามเหลี่ยมหาได้จาก 180°/จำนวนร่องสลอทที่ต้องการ ในตัวอย่างนี้คือ 180°/5=36
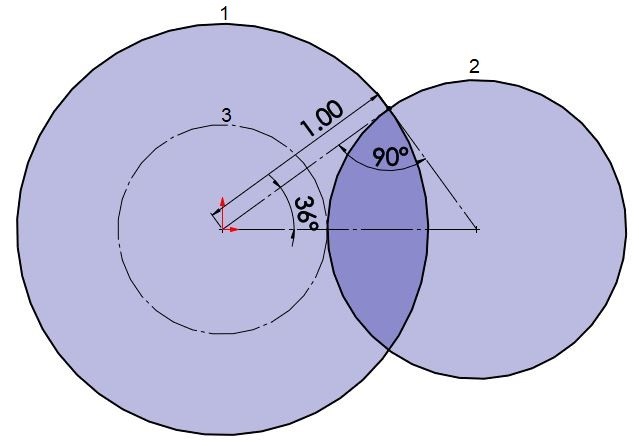
2.วาดวงกลมของล้อเจนิวาตัวตามและตัวขับ 3 วง กำหนดรัศมีของวงกลม ดังรูป
-
- วงกลมใหญ่ (1) จุดศูนย์กลางอยู่ที่มุม 36 ใช้แทนเส้นผ่านศูนย์กลางของล้อเจนิวาตัวตาม
- วงกลม (2) จุดศูนย์กลางอยู่ที่มุมอีกด้านของรูปสามเหลี่ยม ใช้แทนรัศมีของข้อเหวี่ยงเยื้องศูนย์และตำแหน่งของลูกกลิ้งขับ (Driving Roller)
- วงกลมเล็ก (3) จุดศูนย์กลางอยู่ที่มุม 36 ต้องวาดให้สัมผัสกับเส้นรอบวงของวงกลม (2) ใช้แสดงความลึกของร่องสลอทล้อเจนิวาตัวตาม
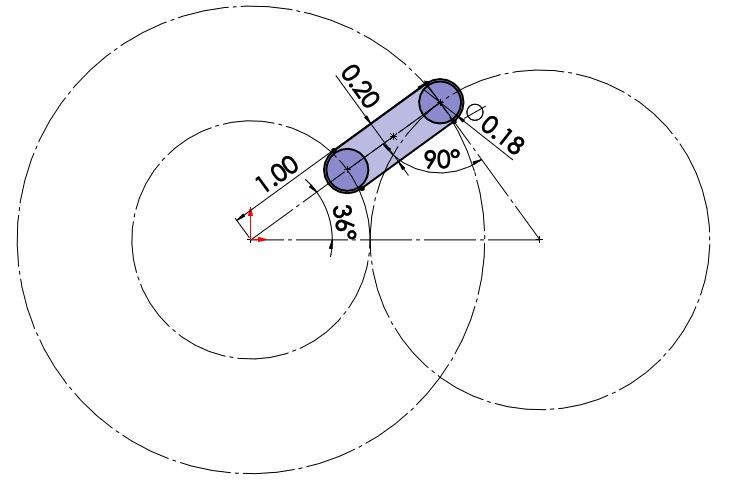
3. วาดร่องสลอทและลูกกลิ้งขับที่ด้านบนของสามเหลี่ยมมุมฉากดังรูป โดยจุดศูนย์กลางของวงกลมร่องสลอททั้งสองด้านต้องอยู่บนเส้นของวงกลมใหญ่ (1) และวงกลมเล็ก (3) ในตัวอย่างนี้ใช้ลูกกลิ้งขับขนาด 0.18 นิ้ว ดังนั้นจึงเลือกขนาดร่องสลอทเป็น 0.20 นิ้ว เพื่อให้มีระยะห่าง
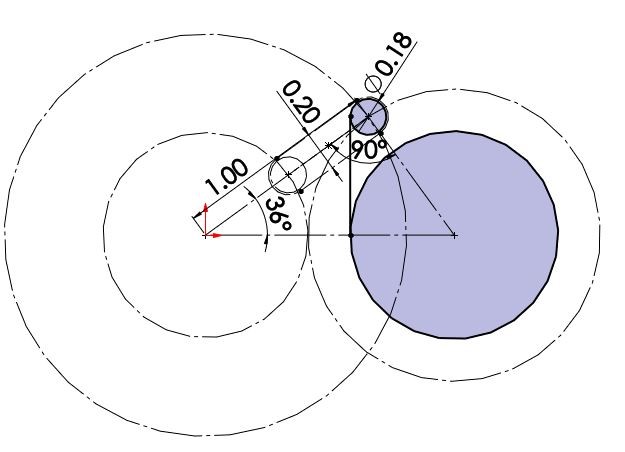
4. วาดเส้นแนวดิ่งที่สัมผัสกับเส้นรอบวงของลูกกลิ้งขับดังรูป
5. วาดวงกลมให้สัมผัสกับเส้นแนวดิ่งจากข้อ 4 จะได้วงกลมอ้างอิงของชิ้นส่วนแผ่นล็อคดังรูป
6.วาดชิ้นส่วนแผ่นล็อคมีระยะเยื้องเล็กน้อยจากวงกลมอ้างอิงข้อ 5 ดังรูป
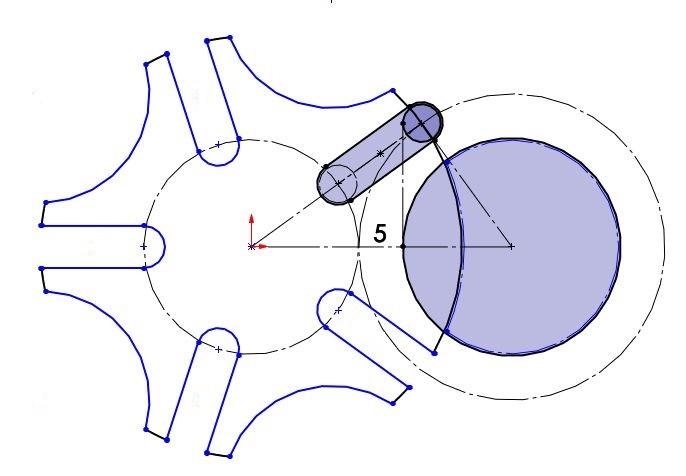
7.วาดร่องสลอทอีก 4 ร่องของล้อเจนิวาตัวตาม ดังรูป
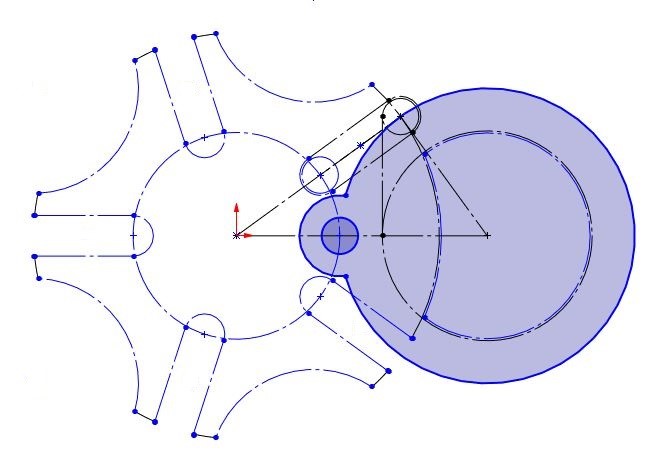
8.วาดข้อเหวี่ยงเยื้องศูนย์และลูกกลิ้งขับ (ข้อเหวี่ยงเยื้องศูนย์สามารถออกแบบได้ตามที่ต้องการ)
เป็นการเสร็จสิ้นการออกแบบกลไกล้อเจนิวา จะได้ชิ้นส่วนต่างๆ ดังรูปที่ 3
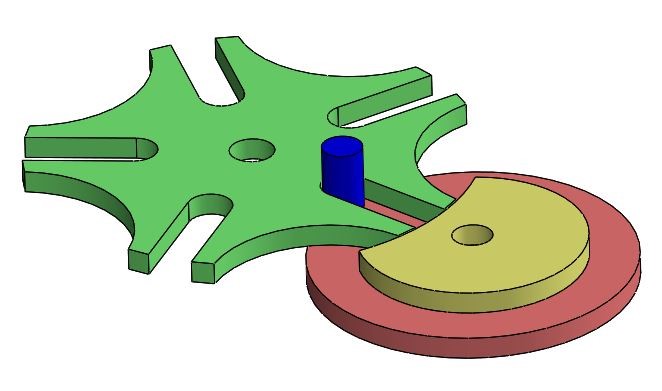
รูปที่ 3 กลไกล้อเจนิวาที่ได้จากการออกแบบ
บทความโดย
จตุรงค์ ลังกาพินธุ์. รองศาสตราจารย์ประจำสาขาวิชาวิศวกรรมเกษตรอุตสาหกรรม ภาควิชาวิศวกรรมเกษตร คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลธัญบุรี
เอกสารอ้างอิง
จตุรงค์ ลังกาพินธุ์ สุนัน ปานสาคร และภูรินทร์ อัครกุลธร, 2557. การพัฒนาเครื่องแทงดีบัว. วารสารสมาคมวิศวกรรมเกษตรแห่งประเทศไทย ปีที่ 20 ฉบับที่ 1 (2557), 9-15
Myszka. David H, 2012. Machines and Mechanisms: Applied Kinematic Analysis, 4th edition, Pearson Education, Upper Saddle River, NJ.


{kind=link}
{kind=link}
{kind=link}