
ล้อคัดท้ายผานไถกึ่งอัตโนมัติ
3 กันยายน 2020
หุ่นยนต์สำหรับตรวจวัดและปรับสภาพดินอัตโนมัติ
3 กันยายน 2020
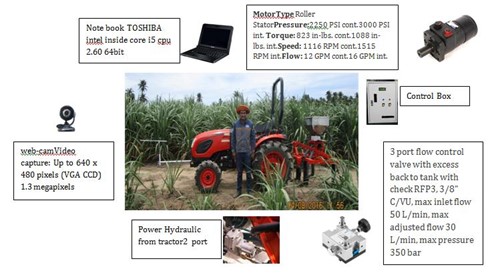
เครื่องใส่ปุ๋ยแบบแม่นยำในไร่อ้อยโดยเทคนิคการประมวลผลภาพ
(Precision Fertilizer in Sugarcane Field using Image Processing Technique)
ประเทศไทยผลิตน้ำตาลส่วนใหญ่เพื่อส่งออกต่างประเทศประมาณร้อยละ 70 ของผลผลิตทั้งหมด ส่วนที่เหลือใช้ในประเทศ โดยประเทศที่ปลูกอ้อยและผลิตน้ำตาลได้มากกว่าปริมาณความต้องการภายในประเทศมีเพียงไม่กี่ประเทศ ซึ่งประเทศไทยเป็นผู้ส่งออกน้ำตาลเป็นอันดับสองของโลก รองจากประเทศบราซิล ทั้งนี้ ต้นทุนการผลิตอ้อยและน้ำตาลของประเทศไทยมีแนวโน้มสูงขึ้น และอ้อยเป็นสินค้าที่อยู่ภายใต้ภาษีข้อตกลง WTO ทำให้ประเทศไทยจำเป็นต้องเพิ่มประสิทธิภาพการผลิตอ้อยและน้ำตาลและเพิ่มประสิทธิการใส่ปุ๋ยและการใส่ปุ๋ยโดยใช้แทรกเตอร์ต่อพ่วงอุปกรณ์เครื่องฝั่งปุ๋ยเข้าทำงานในแปลง ซึ่งทั้งหมดเป็นแนวทางในการลดต้นทุนและเพิ่มผลผลิต เพื่อเพิ่มกำไรแก่เกษตรกรชาวไร่ โดยลักษณะการให้ปุ๋ยแก่อ้อยของเกษตรกรไทยจะให้ปุ๋ยแบบโรยข้างต้นอ้อยโดยกำหนดอัตราการให้ปุ๋ยแบบคงที่ต่อไร่ ในทุกๆ พื้นที่ เท่ากันหมด ไม่สามารถปรับอัตราปุ๋ยได้ โดยมีการออกแบบการให้ปุ๋ยติดกับรถไถเดินตามแบบให้ปุ๋ยแบบปรับอัตราปุ๋ยได้โดยกำหนดที่ เฟืองแบบ 3 ชุด และได้มีการศึกษาเพื่อการใส่ปุ๋ยอ้อยแบบมีประสิทธิภาพสูงที่สุดสำหรับเกษตรกร
การประยุกต์ใช้เทคโนโลยีความแม่นยำทางการเกษตร เพื่อเข้ามาช่วยในระบบการจัดการและการให้ปุ๋ยโดยเป้าหมายหลักคือ การบริหารจัดการการใส่ปุ๋ยโดยใช้ระบบการประมวลผลภาพ (Image Processing) คือ การนำภาพมาประมวลผลหรือคิดคำนวณด้วยคอมพิวเตอร์ เพื่อให้ได้ข้อมูลที่เราต้องการและนำภาพวัตถุที่ได้ไปวิเคราะห์หาข้อมูลเชิงปริมาณ คือ ค่าเปอร์เซ็นต์ความเขียวของพืช จากนั้นเราสามารถนำข้อมูลเชิงปริมาณเหล่านี้ไปวิเคราะห์และสร้างเป็นระบบ เพื่อใช้ประโยชน์ในงานด้านประมวลผล และกำหนดปริมาณการใส่ปุ๋ย ที่เหมาะสมกับอ้อยในช่วงระยะเวลาที่เหมาะสม เพื่อเป็นการลดปริมาณปุ๋ยไม่ให้การสูญเสียและเป็นการลดต้นทุนในการผลิตอ้อยสดจึงได้มีการออกแบบและพัฒนาเครื่องใส่ปุ๋ยแบบควบคุมปริมาณการให้ปุ๋ยสำหรับอ้อย

การออกแบบและสร้างหุ่นยนต์ต้นแบบอัจฉริยะสำหรับตรวจวัดและปรับสภาพดินอัตโนมัติ เพื่อความแม่นยำในการปรับสภาพสารอาหารในดินก่อนทำการเพาะปลูกซึ่งหุ่นยนต์ หรือ โรบอต (robot) คือเครื่องจักรกลชนิดหนึ่ง มีลักษณะ โครงสร้างและรูปร่างแตกต่างกัน หุ่นยนต์ในแต่ละประเภทจะมีหน้าที่การทำงานในด้านต่าง ๆ ตามการควบคุมโดยตรงของมนุษย์ การควบคุมระบบต่างๆ ในการสั่งงานระหว่างหุ่นยนต์และมนุษย์ สามารถทำได้โดยทางอ้อมและอัตโนมัติ โดยทั่วไปหุ่นยนต์ถูกสร้างขึ้นเพื่อสำหรับงานที่มีความยากลำบาก ปัจจุบันเทคโนโลยีของหุ่นยนต์เจริญก้าวหน้าอย่างรวดเร็ว เริ่มเข้ามามีบทบาทกับชีวิตของมนุษย์ในด้านต่าง ๆ และมีการนำหุ่นยนต์มาใช้งานมากขึ้นในปัจจุบัน เช่น ด้านอุตสาหกรรมการผลิต หุ่นยนต์ที่ใช้ในทางการแพทย์ หุ่นยนต์สำหรับงานสำรวจ หุ่นยนต์ที่ใช้งานในอวกาศ ซึ่งแตกต่างจากเมื่อก่อนที่หุ่นยนต์มักถูกนำไปใช้ ในงานอุตสาหกรรมเป็นส่วนใหญ่ จนกระทั่งในปัจจุบันนี้ได้มีการพัฒนาให้หุ่นยนต์นั้นมีลักษณะที่คล้ายมนุษย์ เพื่อให้อาศัยอยู่ร่วมกันกับมนุษย์ ให้ได้ในชีวิตประจำวัน ฉะนั้นการนำหุ่นยนต์มาใช้ในการปรับสภาพดินจะทำให้เกษตรกรประหยัดแรงงาน ต้นทุนการผลิต และเพิ่มผลผลิตได้เป็นอย่างดี
จากการทดลองสมรรถนะของเครื่องใส่ปุ๋ยแบบแม่นยำที่ผ่านระบบการประมวลผลภาพ (Image Processing) โดยใช้ค่าชี้วัดการศึกษาได้แก่ ค่าทางสถิติของความสูง และค่าสถิติของขนาดเส้นผ่านศูนย์กลางของต้นอ้อย เปรียบเทียบระหว่างก่อนใส่ปุ๋ยกับหลังจากใส่ปุ๋ยด้วยเครื่องใส่ปุ๋ยแบบแม่นยำ โดยใช้ค่าความเป็นสีเขียวจากต้นอ้อยตัวอย่างในแปลงทดสอบ มาเป็นตัวกำหนดอัตราการให้ปุ๋ย ซึ้งพบว่า ความสูงของต้นอ้อยมีค่าเบี่ยงเบนมาตรฐานลดลงจากก่อนใส่ปุ๋ย 30.87 % และขนาดเส้นผ่านศูนย์กลางของต้นอ้อย มีค่าเบี่ยงเบนมาตรฐานลดลงจากก่อนใส่ปุ๋ย 36.04% จะเห็นได้ว่าต้นอ้อยมีความสูง และขนาดลำต้นสม่ำเสมอทั่วแปลงทดสอบ และปุ๋ยสามารถใส่ได้ทั่วแปลงทดสอบโดยที่ไม่ต้องเติมปุ๋ยเพิ่มเหมือนแต่ก่อนทำให้สามารถประหยัดต้นทุนให้กลับเกษตรกร

จากการทดลองสมรรถนะของเครื่องใส่ปุ๋ยแบบแม่นยำที่ผ่านระบบการประมวลผลภาพ(Image Processing) โดยใช้ค่าชี้วัดการศึกษาได้แก่ ค่าทางสถิติของความสูง และค่าสถิติของขนาดเส้นผ่านศูนย์กลางของต้นอ้อย เปรียบเทียบระหว่างก่อนใส่ปุ๋ยกับหลังจากใส่ปุ๋ยด้วยเครื่องใส่ปุ๋ยแบบแม่นยำ โดยใช้ค่าความเป็นสีเขียวจากต้นอ้อยตัวอย่างในแปลงทดสอบ มาเป็นตัวกำหนดอัตราการให้ปุ๋ย ซึ้งพบว่า ความสูงของต้นอ้อยมีค่าเบี่ยงเบนมาตรฐานลดลงจากก่อนใส่ปุ๋ย 30.87 % และขนาดเส้นผ่านศูนย์กลางของต้นอ้อย มีค่าเบี่ยงเบนมาตรฐานลดลงจากก่อนใส่ปุ๋ย 36.04% จะเห็นได้ว่าต้นอ้อยมีความสูง และขนาดลำต้นสม่ำเสมอทั่วแปลงทดสอบ และปุ๋ยสามารถใส่ได้ทั่วแปลงทดสอบโดยที่ไม่ต้องเติมปุ๋ยเพิ่มเหมือนแต่ก่อนทำให้สามารถประหยัดต้นทุนให้กลับเกษตรกร
จากความสัมพันธ์ระหว่างความสูงของกล้อง และเปอร์เซ็นต์ความแม่นยำของการปล่อยปุ๋ย พบว่าที่ความสูงในการทดสอบ 3 ระดับ คือ 1 เมตร, 1.2 เมตร, 1.4 เมตร จะมีเปอร์เซ็นต์ความแม่นยำในการให้ปุ๋ย ดังนี้ 81.69%, 84.92% และ 79.91% ตามลำดับ จากการเปรียบเทียบประสิทธิภาพความสัมพันธ์ ระหว่างความสูงของกล้องและเปอร์เซ็นต์ความแม่นยำของการปล่อยปุ๋ย ระยะความสูงของกล้อง web-cam ที่เหมาะสมที่สุด คือ 1.2
ข้อมูลอ้างอิง
[1] กรมส่งเสริมวิชาการเกษตร.2551 แหล่งข้อมูล: http://www.doae.go.th/p/plant/sugar.html
[2] สมชาย สุราช, สิทธิชัย พิมพกาญจน์, ปิยะวดี จันทร์โตพฤกษ์, เครื่องโรยปุ๋ยในร่องอ้อย, ภาควิชา เครื่องจักกลเกษตร, วิศวกรรมและเทคโนโลยีการเกษตร ราชมงคลธัญญบุรี
[3] จิราภรณ์ เบญจประกายรัตน์. เครื่องจักรกลเกษตรเรื่องการเตรียมดิน. คณะวิศวกรรมศาสตร์ สถาบันเทคโนโลยี พระจอมเกล้าเจ้าคุณทหารลาดกระบัง, 2543.
[4] อนุชาติ กังวานณรงค์, ยงยุทธ เทพจินดาและ สมยศ อิสระเสนีย์. การศึกษาเครื่องหยอดปุ๋ยอ้อยหลังการเก็บเกี่ยว. ภาควิชาวิศวกรรมการเกษตร กระทรวงเกษตรและสหกรณ์, กรุงเทพฯ.
[5] Grianggai Samseemoung , Kriattisak Sangpradit 2014, Development of image Data Acquisition system with Unmanned Radio Controlled Helicopter-Mounted Low-Altitude Remote Sensing (LARS) Platform for disease Infestation Monitoring in cassava Plantation
[6] http://www.doa.go.th/plp/plan% 20protection%20rice%20compend/rice%20weed/control.htm
[7] http://www.doa.go.th/data/rice/ sweet.pdf
[8] http://www.doa.go.th/library/html/ detail/Pineappl/pinel12.html
[9] http://www.doa.go.th/plant/suger. htm
[10] http://www.ldda.go.th/pldweb/ tech/manage_land/lob13.html
บทความโดย
1) ผศ.ดร. เกียรติศักดิ์ แสงประดิษฐ์
2) ว่าที่ ร.ต. จุลพงศ์ พฤกษะศรี




{kind=link}
{kind=link}
{kind=link}