
การประยุกต์ใช้เทคโนโลยีภาพถ่ายเชิงพื้นที่ด้วยกล้องมัลติสเปคตรัมสำหรับบริการจัดการปลูกไร่อ้อย
3 กันยายน 2020
เครื่องใส่ปุ๋ยแบบแม่นยำในไร่อ้อยโดยเทคนิคการประมวลผลภาพ
3 กันยายน 2020
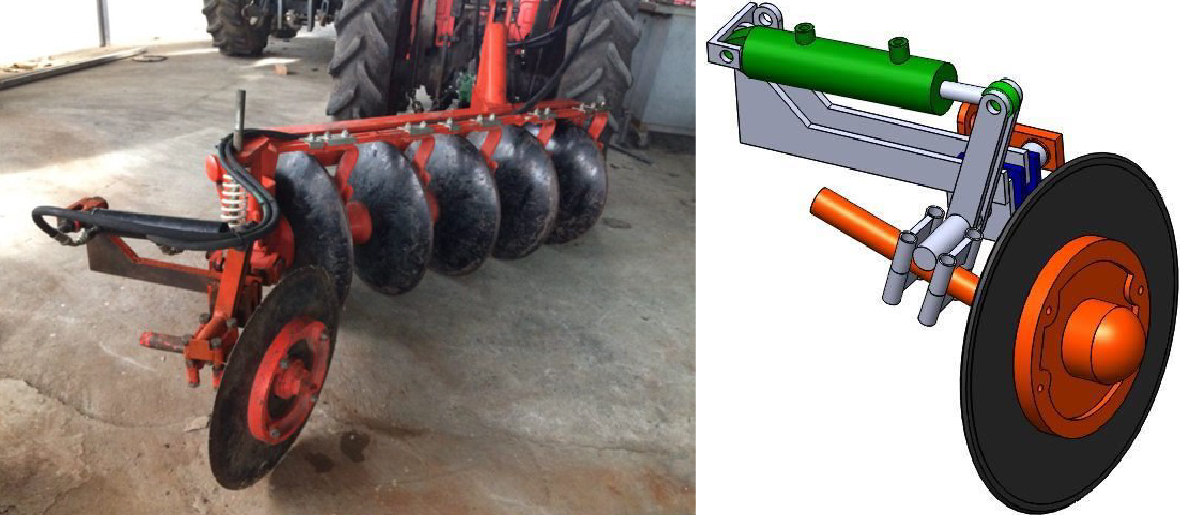
ล้อคัดท้ายผานไถกึ่งอัตโนมัติ
ประเทศไทยเป็นประเทศที่มีการทำการเกษตรมากเป็นอันดับต้นๆของโลก เพราะเป็นพื้นที่ที่มีความอุดมสมบูรณ์เป็นอย่างมาก โดยในการทำการเกษตรแต่ละครั้งนั้นจะต้องอาศัยการเตรียมดินทุกครั้งก่อนที่จะทำการปลูกพืช ทั้งพืชไร่ นาข้าว หรือพืชอื่นๆ ในสมัยอดีต การเตรียมดินจะต้องใช้แรงงานคนและสัตว์เป็นหลัก โดยแรงงานคนจะใช้เครื่องมือจาพวก จอบขุด จอบถาก จอบซี่ ในการเตรียมดิน เครื่องมือเหล่านี้เหมาะใช้กับพื้นที่ที่มีขนาดเล็กๆเท่านั้น ส่วนแรงสัตว์นั้นก็เป็นที่นิยมใช้กันอย่างแพร่หลายทั้งในประเทศและต่างประเทศ การใช้แรงสัตว์ เครื่องมือที่ใช้ได้แก่ ไถหัวหมู เครื่องมือยกร่อง คราดนำดา เครื่องมือเหล่านี้จะใช้กับแรงสัตว์จาพวก วัว ควาย หรือม้าเป็นตัวลากจูงเพื่อผ่อนแรงให้กับคน แต่ทั้งนั้นทั้งนี้แรงงานคนและสัตว์มีความล่าช้าและใช้เวลาในการทำงานเป็นอย่างมาก ดังนั้นจะเห็นได้ว่าการเตรียมดินถือเป็นขั้นตอนที่สาคัญมากในการทำการเกษตร ไม่ใช่แค่จะมุ่งให้แค่ดินร่วนเท่านั้น แต่ยังจะทำให้โครงสร้างของดินเหมาะต่อการเจริญเติบโตของต้นพืช ทำให้พืชสามารถดูดซึมธาตุอาหารพร้อมทั้งอากาศได้เป็นอย่างดี และเพื่อทำลายวัชพืชอีกด้วย เพราะฉะนั้นในการเตรียมดินเป็นขั้นตอนหนึ่งที่ต้องใช้พลังงานและเวลาเป็นอย่างมาก
ปัจจุบันจึงมีการนำเครื่องจักรกลเข้ามาทดแทนการใช้แรงงานคนอย่างแพร่หลาย ทำให้ทำงานได้รวดเร็วได้ประสิทธิภาพและประหยัดเวลามากยิ่งขึ้น ซึ่งอาจทำให้ผลผลิตเพิ่มขึ้นตามมาอีกทำงหนึ่งด้วย ไถจานเป็นอุปกรณ์ที่นำมาใช้กันอย่างแพร่หลายร่วมกับรถไถ ในปัจจุบันไถจานได้ถูกออกแบบและนำมาใช้งานกันมาก แต่ยังมีความสามารถในการทำงานไม่เต็มประสิทธิภาพ เนื่องจากล้อคัดท้ายปรับตั้งได้จากัดในการปรับตั้งล้อคัดท้ายนั้นต้องใช้แรงงานจากผู้ใช้งานอยู่จึงทำให้เสียเวลาและประสิทธิภาพไถลดลง และเสี่ยงต่อการเกิดอุบัติเหตุ ดังนั้นทำงคณะผู้จัดทำมีการคิดออกแบบและสร้างล้อคัดท้ายกึ่งอัตโนมัติสาหรับไถจาน เพื่อให้ตรงตามที่ต้องการของผู้ใช้สามารถทำการปรับตั้งมุมองศาของล้อคัดท้ายให้ง่ายต่อการปรับตั้ง และมีประสิทธิภาพการทำงานเพิ่มขึ้นกว่าปัจจุบัน


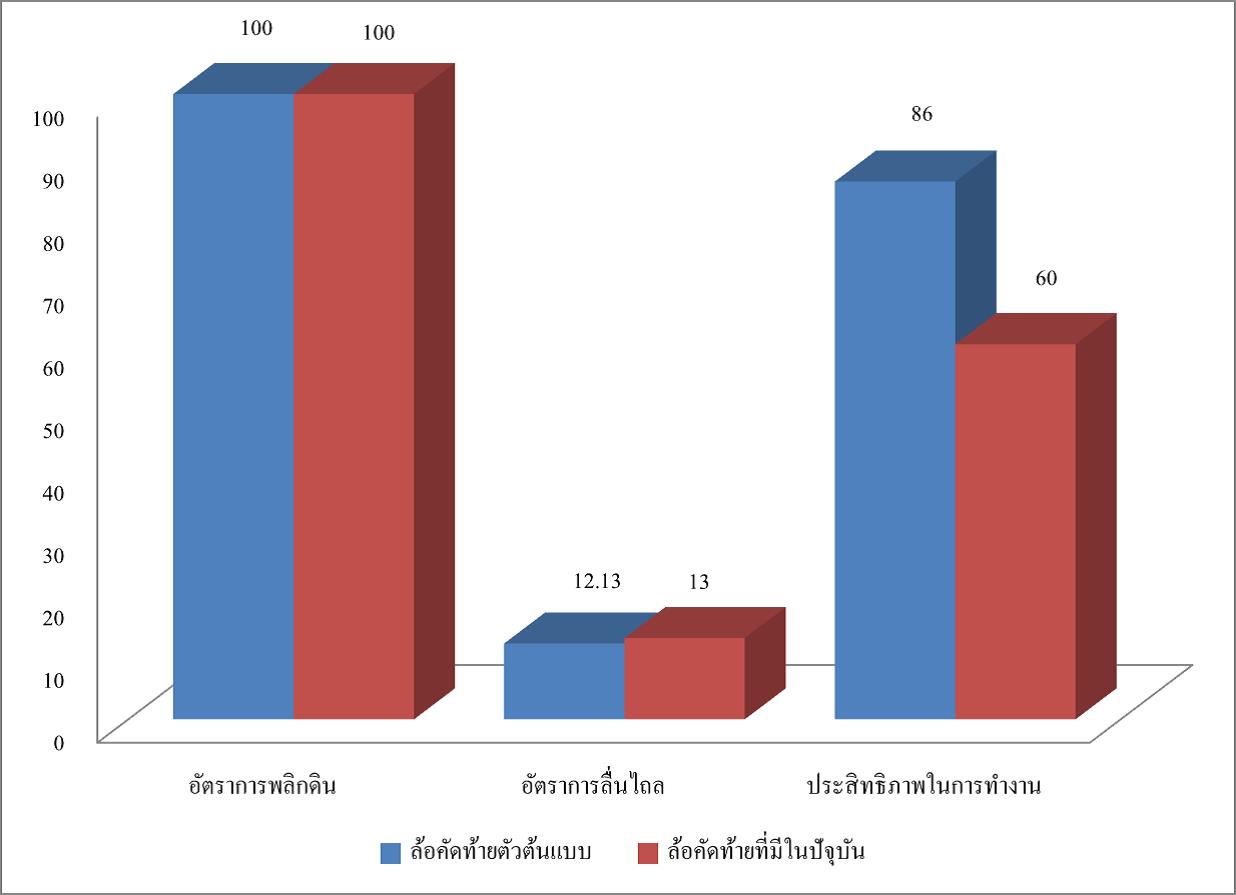
การเตรียมดินที่ใช้รถแทรคเตอร์เป็นต้นกาลังในปัจจุบัน โดยมีอุปกรณ์ที่ใช้ในการเตรียมดินคือชุดไถจาน ลักษณะของชุดไถจานที่นิยมพบเห็นในปัจจุบันจะเป็นชุดไถจานแบบ 3 จาน 5 จาน และ 7 จาน จึงได้ทำการศึกษาข้อมูลและข้อบกพร่องของชุดไถจานเพื่อนำมาพัฒนา ออกแบบ และสร้างล้อคัดท้ายกึ่งอัตโนมัติตัวต้นแบบ ซึ่งจากการศึกษาข้อมูลและปัญหาของล้อคัดท้ายที่มีในปัจุบัน พบว่าในส่วนของการปรับตั้งชุดล้อคัดท้ายนั้นมีการปรับตั้งที่ยังไม่มากพอทำให้การไถค่อนข้างลาบาก และใช้เวลาไถค่อนข้างล้าช้า เนื่องจากต้องใช้แรงงานคนในการปรับ เมื่อทราบข้อมูลที่จาเป็นต่อการออกแบบแล้ว จึงนำข้อมูลที่ได้มาออกแบบและสร้างล้อคัดท้ายกึ่งอัตโนมัติตัวต้นแบบประกอบด้วย ชุดล้อคัดท้าย และชุดไฮดรอลิค จากนั้นได้ทำการทดสอบสมรรถนะในการทำงานของล้อคัดท้ายกึ่งอัตโนมัติตัวต้นแบบ และทำการเปรียบเทียบสมรรถนะในการทำงานกับล้อคัดท้ายที่มีในปัจจุบัน โดยค่าชี้ผลทำงการศึกษาคือ สมรรถนะในการทำงานทำงทฤษฎี สมรรถนะในการทำงานจริง ประสิทธิภาพในการทำงาน อัตราการสิ้นเปลืองเชื้อเพลิง อัตราการพลิกดิน อัตราการลื่นไถล และค่าความชื้นของดิน พบว่าชุดไถจานตัวต้นแบบมีสมรรถนะในการทำงานทำงทฤษฎี 2.86 ไร่ต่อชั่วโมง สมรรถนะในการทำงานจริง 2.47 ไร่ต่อชั่วโมง ประสิทธิภาพในการทำงาน 86 เปอร์เซ็นต์ อัตราการสิ้นเปลืองเชื้อเพลิง 0.92 ลิตรต่อไร่ อัตราการพลิกดิน 100 เปอร์เซ็นต์ อัตราการลื่นไถล 12.13 เปอร์เซ็นต์ และค่าความชื้นของดินอยู่ที่ 11.31เปอร์เซ็นต์ เมื่อเปรียบเทียบกับล้อคัดท้ายที่มีในปัจจุบัน ประสิทธิภาพในการทำงานของล้อคัดท้ายกึ่งอัตโนมัติตัวต้นแบบจะมากกว่าล้อคัดท้ายในปัจจุบัน 26 เปอร์เซ็นต์ มีอัตราการสิ้นเปลืองเชื้อเพลิงน้อยกว่า 0.38 ลิตรต่อไร่ มีอัตราการพลิกดินเท่ากัน และมีอัตราการลื่นไถลน้อยกว่า 0.87เปอร์เซ็นต์ จากการวิเคราะห์เชิงเศรษฐศาสตร์วิศวกรรม พบว่าล้อคัดท้ายกึ่งอัตโนมัติตัวต้นแบบทำงาน 1,440 ชั่วโมงต่อปี มีค่าใช้จ่ายเฉลี่ย 22 บาทต่อไร่ เมื่อเปรียบเทียบค่าใช้จ่ายล้อคัดท้ายกึ่งอัตโนมัติตัวต้นแบบกับล้อคัดท้ายที่มีในปัจจุบันที่ 1 ปี ทำงาน 900 ไร่ จะมีระยะเวลาคืนทุนประมาณ 8.1 เดือน หรือ 6.8 ปี
ข้อมูลอ้างอิง
1) จิราภรณ์ เบญจประกายรัตน์. เครื่องจักรกลเกษตรเรื่องการเตรียมดิน. คณะวิศวกรรมศาสตร์ สถาบันเทคโนโลยี พระจอมเกล้าเจ้าคุณทหารลาดกระบัง, 2543.
2) Grianggai Samseemoung , Kriattisak Sangpradit 2014, Development of image Data Acquisition system with Unmanned Radio Controlled Helicopter-Mounted Low-Altitude Remote Sensing (LARS) Platform for disease Infestation Monitoring in cassava Plantation
บทความโดย
1) ผศ.ดร. เกียรติศักดิ์ แสงประดิษฐ์
2) ว่าที่ ร.ต. จุลพงศ์ พฤกษะศรี




{kind=link}
{kind=link}
{kind=link}