
การประยุกต์ใช้เครื่องขุดหลุมแบบบังคับวิทยุในสวนป่าเศรษฐกิจ (Application of a radio controlled digger in an economic forest plantation)
7 สิงหาคม 2020
การปรับพื้นที่ (Land leveling) เพื่อการเกษตรกรรม
7 สิงหาคม 2020
การประยุกต์ใช้ระบบถ่ายภาพมุมสูงในการทำ GIS Application Mapping
(Application of low altitude imaging system for GIS Application Mapping)
เกษตรกรรมความแม่นยำสูง (Precision Agriculture Technology) เป็นที่นิยมกันมากในประเทศที่พัฒนาแล้วหลายๆ ประเทศ อาทิเช่น ประเทศสหรัฐอเมริกา และ ออสเตรเลีย และเริ่มแพร่หลายเข้าไปในหลายประเทศ ทั้งประเทศแถบยุโรป ญี่ปุ่น และแม้กระทั่งประเทศเพื่อนบ้าน ของเราอย่าง มาเลเซีย ก็มีการนำ Precision Farming มาใช้ในการดูแลสวนปาล์มทั้งที่มีขนาดกลาง และขนาดใหญ่ ซึ่งพบว่ามีผลทำให้มีผลผลิตที่สูงขึ้น ในส่วนของประเทศไทยนั้น มีพื้นที่เกษตรกรรมขนาดใหญ่ มีความหลากหลายทางพืชพันธุ์ มีความได้เปรียบเขาหลายๆ อย่าง จึงน่าจะมีการวิจัยและพัฒนาและนำเอาเทคโนโลยีนี้มาใช้ให้มีความก้าวหน้าและเกิดประโยชน์มากสุด จากการสำรวจพบว่าเทคโนโลยี Precision Agriculture นั้นเกิดจากแนวคิดที่ว่า พืชพันธุ์ที่ปลูก และ สภาพล้อมรอบ อาทิเช่น ดิน น้ำ แสง และอากาศ ในไร่นา นั้นมีความแตกต่างกันเฉพาะของในแต่ละบริเวณ แม้จะอยู่ในบริเวณที่ทำการเกษตรเดียวกันก็ตาม สภาพล้อมรอบที่แตกต่างกันนี้ จะมีผลทำให้การเกิดผลผลิตที่เก็บเกี่ยวได้มีความแตกต่างกันได้ ดังนั้นการปรับปรุงวิธีการดูแลที่ทันช่วงเวลาให้เหมาะสมกับสภาพที่แตกต่างกันนั้น จะทำให้สามารถสร้างผลผลิตที่มากขึ้น อย่างมีประสิทธิภาพที่สุด แต่ปัญหาที่ประสบพบเจอก็คือว่า เราจะสามารถรู้ได้อย่างไรว่า ความแตกต่างในแปลงการเกษตรนั้นมีจริง แล้วจะมีวิธีการวัดและทำการตรวจสอบได้อย่างไร หรือเมื่อได้ผลมาและรู้แล้ว เราจะนำเทคโนโลยี (Precision Agriculture Technology) นั้นมาใช้อย่างไร รวมไปจนถึงจะมีวิธีการบริหารและจัดการอย่างไร ในปัจจุบันนี้นั้นพบว่า นาโนเทคโนโลยีสามารถเข้ามาช่วยในงานของเกษตรกรรมความแม่นยำสูง ในหลายๆ ด้านเริ่มตั้งแต่ในเรื่องของอุปกรณ์ เซ็นเซอร์ตรวจวัด การควบคุมการปลดปล่อยปริมาณปุ๋ย และ ยาฆ่าแมลงด้วยความแม่นยำสูง บรรจุภัณฑ์ทางการเกษตร การตรวจวัดความสด การควบคุมความสดอาหาร ป้ายอิเล็กทรอนิกส์เก็บข้อมูลสินค้า เป็นต้น รูปแสดงข้างล่างนี้เป็นหลักการและแนวคิดของเทคโนโลยีเกษตรกรรมความแม่นยำสูง
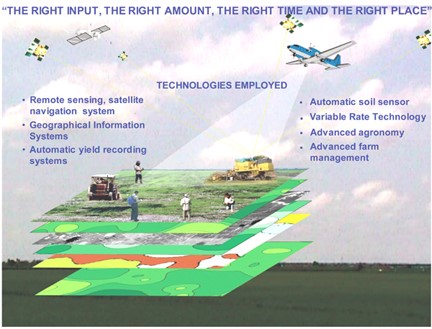
ภาพที่ 1: การนำเอาจำนวนของ อินพุท ที่ถูกต้องทั้งปริมาณและชนิดมาประยุกต์ใช้ให้ถูกกับสถานที่และเวลา [1]
หลักการของ เกษตรกรรมแม่นยำสูง หรือว่า PA นั้น ได้ถูกคิดค้นใช้ในครั้งแรกที่สหรัฐอเมริกาในต้น คริสศักราช 1970 แต่ไม่ค่อยได้รับผลความสำเร็จในเวลานั้น เนื่องมาจากเทคโนโลยีสนับสนุนทางด้านอุปกรณ์ในช่วงเวลานั้นยังมีความเที่ยงตรงแม่นยำน้อย หลังจากช่วงเวลานั้นอีก 10 ปีต่อมา ก็ได้เกิดเทคโนโลยีใหม่และได้มีการนำออกมาใช้กันอย่างกว้างขวาง โดยเทคโนโลยีนั้นเรียกว่า เทคโนโลยีการตรวจจับระยะไกล หรือ Remote Sensing Technology นั่นเอง
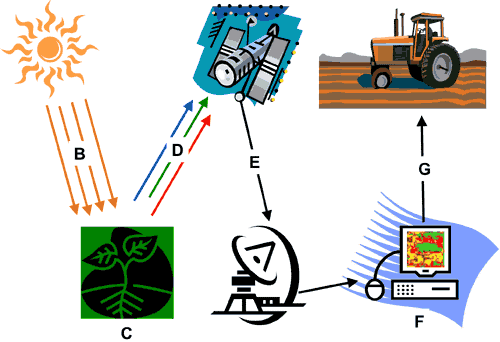
ภาพที่ 2: ขั้นตอนของเทคโนโลยีการตรวจจับระยะไกล [2]
ระบบถ่ายภาพมุมสูงแบบอัตโนมัติ ในระดับความสูงจากพื้นดินประมาณ 15 เมตร แบบติดตั้งท้ายรถแทรกเตอร์เพื่อการเกษตร (Low altitude less dynamic image data acquisition system mounted on crane with Tractor attachment) ซึ่งเป็นระบบถ่ายภาพมุมสูงแบบอัตโนมัติ สามารถที่จะทำการถ่ายภาพมุมสูงได้ตั้งแต่ระดับ 5 เมตรเหนือพื้นดินขึ้นไปจนถึงระดับ 15 เมตร และในวารสารฉบับหัวข้อนี้นั้น จะเป็นการนำเสนอข้อมูลจริงจากงานวิจัยของ อาจารย์เกรียงไกร แซมสีม่วง สาขาวิชาวิศวกรรมเครื่องจักรกลเกษตรภาควิชาวิศวกรรมเกษตร คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลธัญบุรี ซึ่งในงานวิจัยนี้นั้น จะเป็นการศึกษาและเปรียบเทียบคุณสมบัติของข้อมูลภาพถ่ายที่ได้จากกล้อง ดิจิตอลแบบธรรมดา ราคาถูกที่มีขายทั่วไปในท้องตลาด กับข้อมูลภาพถ่ายที่ได้จากกล้องแบบอินฟราเรดและนำข้อมูลที่ได้นั้น ไปขยายผลต่อเป็นแผนที่ประยุกต์ทางการเกษตร ในลักษณะของการเจริญเติบโตของพืช และปริมาณความหนาแน่นของวัชพืชในแปลงการเกษตร ที่มีความแปรผันต่อจำนวนวันหลังจากการงอกของพืช ซึ่งัติของัยนี้นั้นจะเป็นการศึกษาและเกรียงไกร แซมสีม่วง ภาควิชาวิศวกรรมเกษตร คณะวิศวกรรมศาสตร์แทนกล้องอินฟราเรดได้ เนื่องเพราะอาจจะมีข้อสงสัยกันว่า ทำไมจะต้องเปรียบเทียบคุณภาพของข้อมูลภาพถ่ายที่ได้จากกล้องทั้งสองประเภท ที่ระดับความสูงแตกต่างกัน (5, 10 และ 15 เมตร) และที่จำนวนวันหลังจากที่พืชในแปลงการเกษตรงอก (7, 14, 21 และ 28 DAG) โดยคำตอบก็คือว่า เราต้องการที่จะรู้ให้ได้ว่าที่ระดับความสูงระดับไหนกันแน่ที่กล้องดิจิตอลธรรมดา สามารถที่จะทำการถ่ายภาพมุมสูงแทนกล้องอินฟราเรดได้ เนื่องเพราะด้วยกล้องอินฟราเรดนั้น มีราคาที่สูงกว่ากล้องดิจิตอลมาก และโดยวิธีการนี้นั้นเองเราก็จะสามารถประหยัดต้นทุนลงได้ หลักการทำงานของ ระบบการถ่ายภาพมุมสูงแบบอัตโนมัติ ที่มีการติดตั้งระบบกล้องขึ้นไปแขวนไว้กับชุดเครนที่ทำการออกแบบโดยใช้รถแทรกเตอร์เป็นต้นกำลัง โดยที่มีความสามารถในการถ่ายภาพมุมสูงได้ถึงระดับที่ 15 เมตรจากพื้นดิน มีต้นทุนในการจัดสร้างที่น้อยมากๆและยังพบว่ามีค่าความปลอดภัยในการปฏิบัติงานนั้นอยู่ในระดับที่ยอมรับได้ แต่มีข้อที่ควรปรับปรุงอยู่ก็คือว่า ยังคงต้องใช้แรงงานคนจำนวน 4 คนในการบังคับรถแทรกเตอร์ และทำการถอดประกอบและติดตั้งชุดเครนในการทดสอบแต่ละครั้ง เมื่อทำการติดตั้งอุปกรณ์ชุดเครนเข้ากับท้ายรถแทรกเตอร์แล้วนั้น ต่อจากนั้นเราก็ทำการติดตั้งชุดกล้องทั้งสองแบบ และชุดบังคับการกดชัตเตอร์ถ่ายภาพอัตโนมัติ ติดกับชุดสลิงและทำการแขวนขึ้นไปกับชุดเครน ในงานวิจัยนี้เราจะทำการถ่ายภาพที่ความสูงสามระดับความสูง (5, 10 และ 15 เมตร ตามลำดับ) และทำการทดสอบถ่ายภาพสี่ช่วงเวลาหลังจากการงอกของพืช (7, 14, 21 และ 28DAG) ซึ่งผลการทดสอบหลังจาก การประยุกต์ใช้ ซอฟแวร์ทางด้านระบบประมวลผลภาพ (Image processing analysis software) พบว่า หลังจากแยกพืชสีเขียวออกจากพื้น Back ground แล้วผลที่ได้นั้น ดังแสดงในรูปและตารางข้างล่างนี้
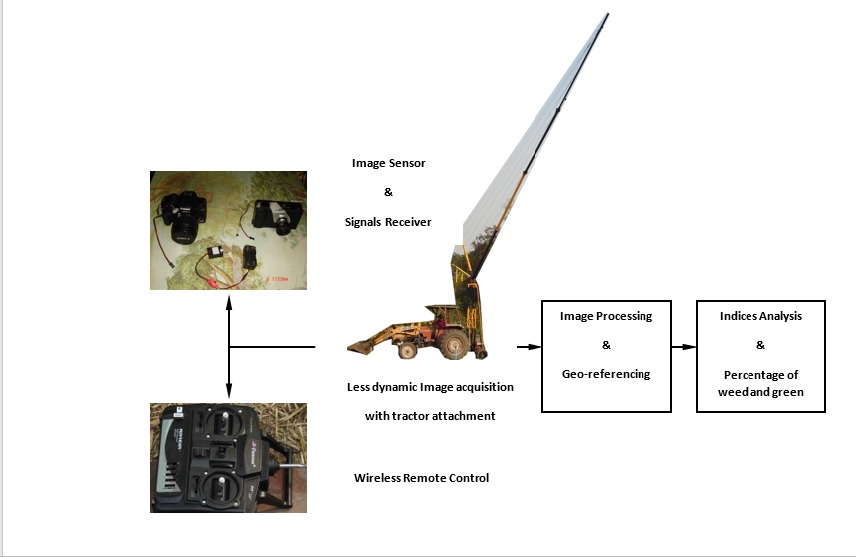
ภาพที่ 3: ส่วนประกอบหลักของชุดระบบการถ่ายภาพมุมสูงติดท้ายรถแทรกเตอร์ และชุดควบคุมการกดปุ่มชัตเตอร์ภาพแบบอัตโนมัติ [3]
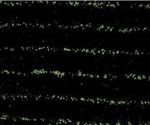
ข้อมูลของภาพถ่ายมุมสูงที่ได้จากการทดลองนี้ จากผลการทดสอบทั้งหมดจำนวนสี่ครั้ง (7, 14, 21, 28DAG) พบว่าที่ความสูงสิบเมตรเหนือพื้นดินนั้น ข้อมูลของภาพที่ได้มามีความคมชัดในระดับที่ยอมรับได้ ดังแสดงในภาพด้านล่างนี้
-

- (A)

-
- (B)
-
- (C)
-

- (D)

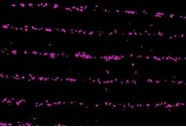
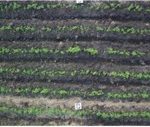
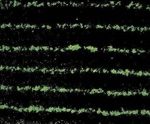
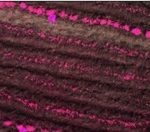
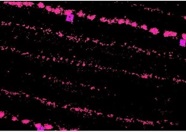
ภาพที่ 4: ข้อมูลภาพถ่ายมุมสูงที่ระดับความสูง 10m และที่ช่วงเวลา 7 DAG พบว่า True RGB image (A) Segmentation RGB image (B) True NIR image (C) Segmentation NIR image (D).
-

- (E)

-
- (F)

-
- (G)
-
- (H)
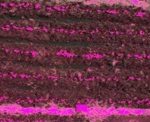
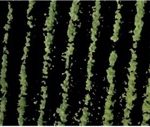
ภาพที่ 5: ข้อมูลภาพถ่ายมุมสูงที่ระดับความสูง 10m และที่ช่วงเวลา 14 DAG พบว่า True RGB image (E) Segmentation RGB image (F) True NIR image (G) Segmentation NIR image (H).
-
- (I)

-
- (J)

-
- (K)

-

- (L)
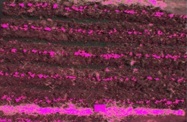
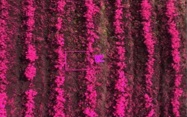
ภาพที่ 6: ข้อมูลภาพถ่ายมุมสูงที่ระดับความสูง 10m และที่ช่วงเวลา 21 DAG พบว่า: True RGB image (I) Segmentation RGB image (J) True NIR image (K) Segmentation NIR image (L).
-

- (M)

-
- (N)

-

- (O)
-
- (P)

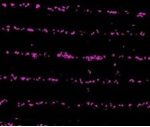
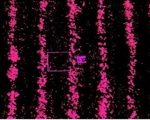
ภาพที่ 7: ข้อมูลภาพถ่ายมุมสูงที่ระดับความสูง 10m และที่ช่วงเวลา 28 DAG พบว่า True RGB image (M) Segmentation RGB image (N) True NIR image (O) Segmentation NIR image (P).
ตารางที่ 1 แสดงค่าเปอร์เซ็นต์ของความเขียว และวัชพืช ที่ได้จากการทดสอบโดยการใช้กล้องแบบดิจิตอลธรรมดา และแบบอินฟราเรด ที่ระดับความสูง 5, 10, 15 เมตรและช่วงเวลาหลังจากการงอก 7, 14, 21, 28DAG
|
Day After Germination (DAG)
|
Altitude Level (m) |
Percentage of greenness D C (%) |
Percentage of greenness NIR C (%) |
Percentage of weed D C (%) |
Percentage of weed NIR C (%)
|
|
7 DAG |
5 |
11.09a |
40.97e |
5.67a |
23.27b |
| 10 | 19.32b | 35.29d | 6.49a | 25.20b | |
| 15 | 26.89c | 37.47e | 7.47a | 35.49c | |
| 14 DAG | 5 | 18.89a | 43.96b | 12.27a | 20.04b |
| 10 | 19.92a | 46.34c | 14.74a | 25.13c | |
| 15 | 20.03a | 44.04b | 13.15a | 24.09c | |
| 21 DAG | 5 | 26.37a | 48.78d | 18.49a | 33.07c |
| 10 | 30.17b | 46.01c | 23.31b | 30.88c | |
| 15 | 31.23b | 44.52c | 21.71b | 37.98d | |
| 28 DAG | 5 | 36.24a | 51.44c | 26.38a | 37.06c |
| 10 | 36.02a | 58.81d | 29.64b | 37.70c | |
| 15 | 42.59b | 63.50d | 32.53b |
39.11d
|
Means for each characteristic followed by the same column are not significantly different at P<0.05 by Duncan’s Multiple Range test.
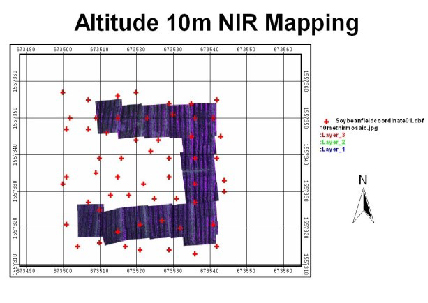
หลังจากนั้นลักษณะการประยุกต์จากข้อมูลภาพถ่ายทางอากาศไปเป็นการสร้างแผนที่ประยุกต์ทางการเกษตร ดังนี้
-

- (A)
-
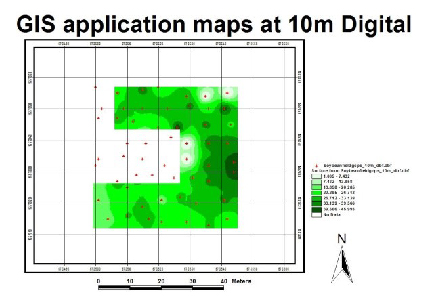
- (B)
-
- (C)
-

- (D)
ภาพที่ 8: แผนที่แบบ GIS application mapping เหมาะสำหรับเป็นข้อมูลในการเฝ้าระวังดูแลรักษา การเจริญเติบโตของพืชในแปลงการเกษตรและประยุกต์ใช้คู่กับการฉีดพ่นสารเคมีในปริมาณที่เหมาะสมต่อความหนาแน่นของวัชพืชหรือโรคพืช พบว่า True RGB image maps at height of 10m by using D C (A), GIS application maps at height of 10m by using D C (B), near-infrared image maps at height of 10m by using NIR C (C) and GIS application maps at height of 10m by using NIR C (D) [4].
บทความโดย
รศ.ดร.เกรียงไกร แซมสีม่วง สาขาวิชาวิศวกรรมเกษตรอุตสาหกรรม ภาควิชาวิศวกรรมเกษตร คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลธัญบุรี
เอกสารอ้างอิง
[1] Swain, K. C., & Jayasuriya, H. P. W. (2007). Land-use suitability evaluation criteria for precision agriculture adoption in a moderately yielding soybean cropping area in Thailand. Asia-Pacific Journal of Rural Development, 17(1), 113–125.
[2] Tangwongkit, R., Salokhe, V. M., & Jayasuriya, H. P. W. (2006). Development of a real-time, variable rate herbicide applicator using machine vision for between-row weeding of sugarcane fields. The CIGR E-Journal, 8, 1–12.
[3] Samseemoung, G., Jayasuriya, H. P. W., & Soni, P. (2011). Oil palm pest infestation monitoring and evaluation by helicopter-mounted, low altitude remote sensing platform, Journal of Applied Remote Sensing, 5, 053540; doi:10.1117/1.3609843.
[4] Tillet, N. D., Marchant, J. A., & Hague, T. (1996). Autonomous plant scale crop protection, Abstracts of the International Conference on Agricultural Engineering, AgEng Madrid 96, Paper No. 96A-124, pp. 255–256.



{kind=link}
{kind=link}
{kind=link}