
กสอ.มทร.ธัญบุรี”เปิดกิจกรรมเครือข่าย”ผู้ให้บริการเครื่องจักรกลทางการเกษตร (นิวรีพอร์ต)
4 สิงหาคม 2020
การเปลี่ยนใบอ้อยเป็นพลังงานทางเลือกช่วยลดปัญหาฝุ่น PM 2.5
7 สิงหาคม 2020
เทคโนโลยีหุ่นยนต์ในสวนเกษตรหลังบ้าน (Applied robotic technology to in house farm)
ปัจจุบัน ประชากรในเมืองหรือเขตเศรษฐกิจ มีแนวโน้มที่จะเพาะปลูกพืชผัก ผลไม้ ไว้รับประทานเองในบ้านหรือที่พักอาศัยมากขึ้น เนื่องด้วยผลิตผลทางการเกษตรส่วนใหม่จากตลาดมักประสบปัญหาอาธิ สารเคมีตกค้าง การปนเปื้อน คุณภาพไม่ดี แต่ ด้วยกิจวัตร เวลาส่วนใหญ่ของประชากรกลุ่มนี้ถูกใช้หมดไปกับการทำงานทำให้การเพาะปลูกเองเป็นไปได้ยาก หุ่นยนต์จึงเป็นเทคโนโลยีที่ถูกนำมาใช้แก้ปัญหานี้
การใช้หุ่นยนต์ในการเพาะปลูกแทนมนุษย์ เริ่มเป็นที่นิยมมากในปัจจุบัน เนื่องด้วย มนุษย์ไม่ต้องเข้ามาจัดการเอง สามารถไปทำกิจกรรมอื่น โดยให้หุ่นยนต์มาทำหน้าที่แทน ตั้งแต่ หว่านเมล็ด รดน้ำ ใส่ปุ๋ย กำจัดวัชพืชในแปลงปลูก จนกระทั่งเก็บเกี่ยวผลผลิต ดังภาพ 4.1 โดยโปรเจคที่มีชื่อเสียงมากอันหนึ่งคือ ฟาร์มบอท(Farmbot) ต่อตั้งโดยกลุ่มนักศึกษาจากมหาวิทยาลัยแคลิปเฟอร์เนีย โพลีเทคนิค สเตท

(a)

(b)
ภาพ 4.1 (a) แปรผักสวนครัวที่จัดการด้วยหุ่นยนต์[1] (b) ตัวอย่างกิจกรรมการปลูกที่ด้วยหุ่นยนต์[2]
โดยทั่วไปแล้ว การใช้เทคโนโลยีหุ่นยนต์ในงานเกษตรจะประกอบศาสตร์สำคัญ สี่ประการ มาบูรณาการณ์เข้าด้วยกัน คือ (1) การออกเครื่องกล(Mechanical design) (2) การออกแบบระบบไฟฟ้าควบคุม(Electronic control) (3) การเขียนโปรแกรมคอมพิวเตอร์ควบคุม(Robot computer programming) และ (4) เทคโนโลยีการมองเห็นของคอมพิวเตอร์(Computer vision) ซึ่งมีรายละเอียดดังต่อไปนี้
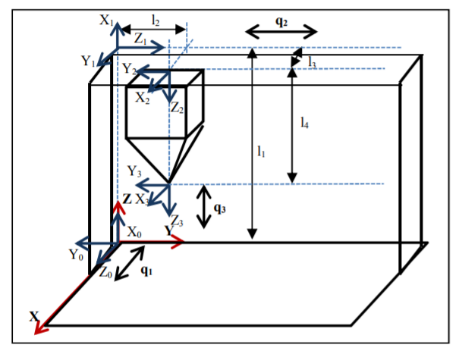
การออกแบบเครื่องกล คือ ศาสตร์แขนงหนึ่งในวิศวกรรมเครื่องกล ที่เกี่ยวข้องกับการออกแบบกลไกการเคลื่อนที่ของหุ่นยนต์(Robot kinematics) เพื่อให้มีการเคลื่อนและปฏิบัติงานตามจุดประสงค์ที่ต้องการได้ ดังภาพ 4.1(a) ที่แสดงการออกแบบหุ่นยนต์สามแกนแบบเชิงเส้น (x-y-z Cartesian kinematics) และการจำลองการเคลื่อนที่ของซอฟแวร์ทางวิศวกรรม(Computer Aided Engineering: CAE) ดังภาพ 4.1(b)
(a)

(b)
ภาพ 4.1(a) กลไลการเคลื่อนที่ของหุ่นยนต์ฟาร์บอท[3]. (b) การจำลองการเคลื่อนที่หุ่นยนต์ด้วยซอร์แวร์ทางวิศวกรรม
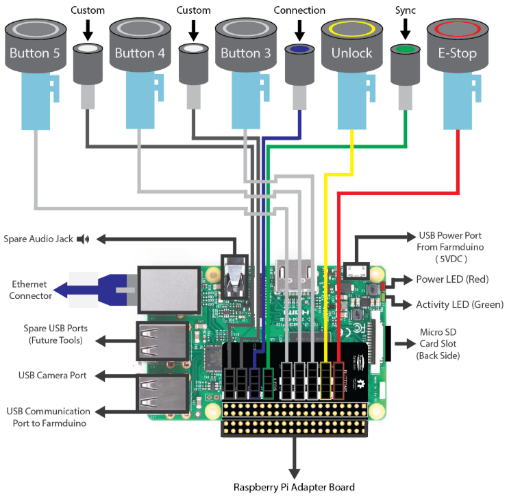
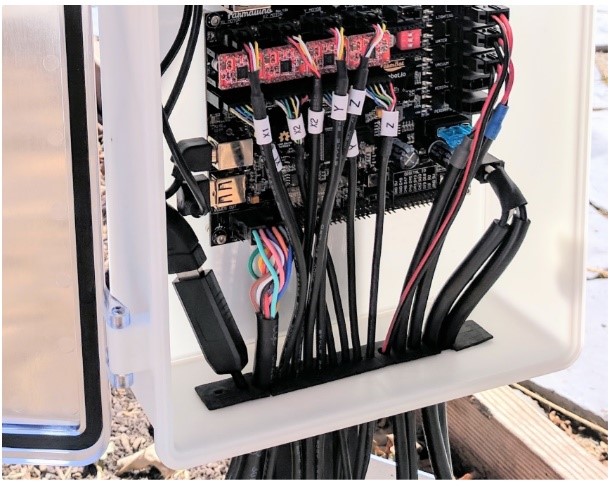
การออกแบบระบบไฟฟ้าควบคุม คือ ศาสตต์แขนงหนึ่งของวิศวกรรมไฟฟ้า ที่เกี่ยวข้องกับการเลือกใช้เซนเซอร์ต่างๆที่เกี่ยวข้องกับการเคลื่อนที่ของหุ่นยนต์ อาธิเช่น เอ็นโคดเดอร์สำหรับวัดตำแหน่งการเคลื่อนที่ของหุ่นยนต์ เซ็นเซอร์ป้องกันการชน(limit switches) วงจรขับเคลื่อนมอเตอร์ไฟฟ้า(motor driver) การติดต่อกับผู้ใช้งาน(User interface) ดังภาพ 4.2(a-b)
(a)
(b)
ภาพ 4.2(a-b) วงจรควบคุมทางไฟฟ้าสำหรับหุ่นยนต์ฟาร์มบอท[4]
การเขียนโปรแกรมคอมพิวเตอร์ควบคุม คือ การสร้างชุมคำสั่งการทำงานของหุ่นยนต์ลงในระบบคอมพิวเตอร์ เพื่อให้หุ่นยนต์มีการตอบสนองการจุดประสงค์ที่ต้องการอย่างถูกต้อง หรือ การรับคำสั่งจากผู้ใช้งานดังภาพ 4.3 ที่แสดงการเลือกชนิดและตำแหน่งการปลูกของพืชต่างๆกัน

ภาพที่ 4.3 การเลือกข้อมูลชนิดและตำแหน่งการปลูกผักในซอร์แวร์สำหรับผู้ใช้งาน[5]
เทคโนโลยีการมองเห็นของคอมพิวเตอร์ คือ ศาสตร์แขนงหนึ่งในวิทยาศาสตร์คอมพิวเตอร์(Computer science) ที่สอนให้คอมพิวเตอร์รู้จักแยกแยะข้อมูลทางภาพ และนำข้อมูลเหล่านี้มาใช้ประยุกต์ใช้งาน ตัวอย่างในการเกษตร อาธิ การตรวจจับตำแหน่งวัชพืช ที่ขึ้นในแปลงผัก เพื่อส่งคำสั่งให้หุ่นยนต์ทำการกำจัดทิ้งดังภาพ 4.4
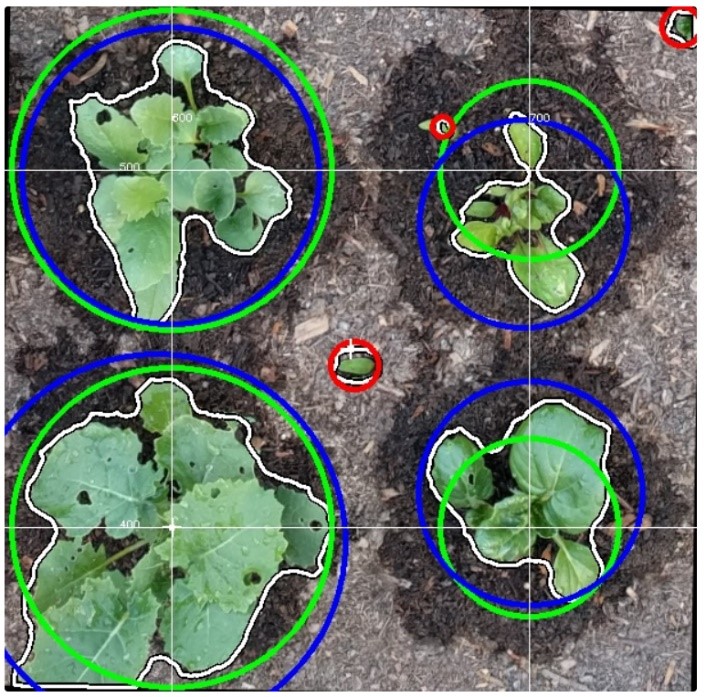
ภาพที่ 4.4 การประมวลผลภาพเพื่อตรวจจับวัชพืชที่ขึ้นในแปลงผัก[6]
บทความโดย
ดร.วิพุธ ตุวยานนท์ สาขาวิชาวิศวกรรมเกษตรอุตสาหกรรม ภาควิชาวิศวกรรมเกษตร คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลธัญบุรี
เอกสารอ้างอิง
[1] https://en.wikipedia.org/wiki/FarmBot
[3] M. Erick, S. Fiestas, R. Sixto and G. Prado, “Modeling and Simulation of Kinematics and Trajectory Planning of a Farmbot Cartesian Robot,” 2018 IEEE XXV International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Lima, 2018, pp. 1-4, doi: 10.1109/INTERCON.2018.8526399.
[4] https://genesis.farm.bot/docs/electronics
[5] https://developer.farm.bot/docs/user-interface
[6] https://software.farm.bot/docs/weed-detection




{kind=link}
{kind=link}
{kind=link}